

Processeur (CPU) : principe de fonctionnement et choix
Processeur (CPU) : principe de fonctionnement et choix

Le processeur (CPU) est le cerveau de tout ordinateur. Son architecture (nombre de coeurs, mémoire cache, finesse de gravure…) et sa fréquence de fonctionnement sont déterminantes pour ses performances, et donc son utilisation.
Le processeur, aussi appelé CPU (Central Processing Unit), c'est le cerveau de l'ordinateur, le calculateur. Il prend la forme d'une puce électronique (souvent carrée), constituée de millions voire de milliards de transistors microscopiques (des composants élémentaires qui fonctionnent comme des interrupteurs). Ce circuit électronique est capable de gérer des centaines de formules, requêtes et calculs en même temps ou presque, afin de traiter les informations qui lui sont envoyées. Autant dire que s'arrêter un instant sur ce qu'on en attend est primordial. Qu'attendez-vous de votre ordinateur ? Simplement un outil de bureautique ? Un centre média pour visionner des photos, des vidéos ou la TV ? Ou encore une console de jeux au graphisme hyper réaliste ? De cet usage dépendra votre besoin en processeu
Comment fonctionne un processeur ?
Pour faire simple, le processeur exécute les programmes informatiques. Pour ça, il reçoit des informations sous forme d'instructions de la part de la mémoire vive de l'ordinateur, qui reçoit les elle-même d'autres éléments (SSD, disque dur, clé USB, Internet…). Les données circulent entre les deux grâce à un canal de communication appelé bus. Chaque processeur possède une architecture qui lui est propre. Il effectue les calculs qu'on lui demande, puis retourne les résultats à la mémoire vive. À chaque impulsion ou cycle (également appelé fréquence d'horloge), le processeur effectue une action qui correspond à une instruction ou une partie d'instruction simple. Le nombre de cycles par seconde détermine la fréquence du processeur, mesurée en hertz (Hz). Une fréquence de 2 gigahertz (GHz) correspond ainsi à 200 milliards de cycles par seconde. Plus la fréquence de l'horloge est élevée plus le processeur est rapide.
Le processeur (noté CPU, pour Central Processing Unit) est un circuit électronique cadencé au rythme d'une horloge interne, grâce à un cristal de quartz qui, soumis à un courant électrique, envoie des impulsions, appelées " top ". La fréquence d'horloge (appelée également cycle, correspondant au nombre d'impulsions par seconde, s'exprime en Hertz (Hz). Ainsi, un ordinateur à 200 MHz possède une horloge envoyant 200 000 000 de battements par seconde. La fréquence d'horloge est généralement un multiple de la fréquence du système (FSB, Front-Side Bus), c'est-à-dire un multiple de la fréquence de la carte mère
A chaque top d'horloge le processeur exécute une action, correspondant à une instruction ou une partie d'instruction. L'indicateur appelé CPI (Cycles Par Instruction) permet de représenter le nombre moyen de cycles d'horloge nécessaire à l'exécution d'une instruction sur un microprocesseur. La puissance du processeur peut ainsi être caractérisée par le nombre d'instructions qu'il est capable de traiter par seconde. L'unité utilisée est le MIPS (Millions d'Instructions Par Seconde) correspondant à la fréquence du processeur que divise le CPI.
Instruction
Une instruction est l'opération élémentaire que le processeur peut accomplir. Les instructions sont stockées dans la mémoire principale, en vue d'être traitée par le processeur. Une instruction est composée de deux champs :
- le code opération, représentant l'action que le processeur doit accomplir ;
- le code opérande, définissant les paramètres de l'action. Le code opérande dépend de l'opération. Il peut s'agir d'une donnée ou bien d'une adresse mémoire.
| Code opération | Champ opérande |
Le nombre d'octets d'une instruction est variable selon le type de donnée (l'ordre de grandeur est de 1 à 4 octets).
Les instructions peuvent être classées en catégories dont les principales sont :
- Accès à la mémoire : des accès à la mémoire ou transferts de données entre registres.
- Opérations arithmétiques : opérations telles que les additions, soustractions, divisions ou multiplication.
- Opérations logiques : opérations ET, OU, NON, NON exclusif, etc.
- Contrôle : contrôles de séquence, branchements conditionnels, etc.
Registres
Lorsque le processeur exécute des instructions, les données sont temporairement stockées dans de petites mémoires rapides de 8, 16, 32 ou 64 bits que l'on appelle registres. Suivant le type de processeur le nombre global de registres peut varier d'une dizaine à plusieurs centaines.
Les registres principaux sont :
- le registre accumulateur (ACC), stockant les résultats des opérations arithmétiques et logiques ;
- le registre d'état (PSW, Processor Status Word), permettant de stocker des indicateurs sur l'état du système (retenue, dépassement, etc.) ;
- le registre instruction (RI), contenant l'instruction en cours de traitement ;
- le compteur ordinal (CO ou PC pour Program Counter), contenant l'adresse de la prochaine instruction à traiter ;
- le registre tampon, stockant temporairement une donnée provenant de la mémoire.
Mémoire cache
La mémoire cache (également appelée antémémoire ou mémoire tampon) est une mémoire rapide permettant de réduire les délais d'attente des informations stockées en mémoire vive. En effet, la mémoire centrale de l'ordinateur possède une vitesse bien moins importante que le processeur. Il existe néanmoins des mémoires beaucoup plus rapides, mais dont le coût est très élevé. La solution consiste donc à inclure ce type de mémoire rapide à proximité du processeur et d'y stocker temporairement les principales données devant être traitées par le processeur. Les ordinateurs récents possèdent plusieurs niveaux de mémoire cache :
- La mémoire cache de premier niveau (appelée L1 Cache, pour Level 1 Cache) est directement intégrée dans le processeur. Elle se subdivise en 2 parties :
- La première est le cache d'instructions, qui contient les instructions issues de la mémoire vive décodées lors de passage dans les pipelines.
- La seconde est le cache de données, qui contient des données issues de la mémoire vive et les données récement utilisées lors des opérations du processeur.
Les caches du premier niveau sont très rapides d'accés. Leur délai d'accès tend à s'approcher de celui des registres internes aux processeurs.
- La mémoire cache de second niveau (appelée L2 Cache, pour Level 2 Cache) est située au niveau du boîtier contenant le processeur (dans la puce). Le cache de second niveau vient s'intercaler entre le processeur avec son cache interne et la mémoire vive. Il est plus rapide d'accès que cette dernière mais moins rapide que le cache de premier niveau.
- La mémoire cache de troisième niveau (appelée L3 Cache, pour Level 3 Cache) autrefois située au niveau de la carte mère (utilisation de la mémoire centrale), elle est aujourd'hui intégré directement dans le CPU.
Tous ces niveaux de cache permettent de réduire les temps de latence des différentes mémoires lors du traitement et du transfert des informations. Pendant que le processeur travaille, le contrôleur de cache de premier niveau peut s'interfacer avec celui de second niveau pour faire des transferts d'informations sans bloquer le processeur. De même, le cache de second niveau est interfacé avec celui de la mémoire vive (en l'absence de cache de troisième niveau intégré), pour permettre des transferts sans bloquer le fonctionnement normal du processeur.
Signaux de commande
Les signaux de commande sont des signaux électriques permettant d'orchestrer les différentes unités du processeur participant à l'exécution d'une instruction. Les signaux de commandes sont distribués grâce à un élément appelé séquenceur. Le signal Read / Write, en français lecture / écriture, permet par exemple de signaler à la mémoire que le processeur désire lire ou écrire une information.
Unités fonctionnelles
Le processeur est constitué d'un ensemble d'unités fonctionnelles reliées entre elles. L'architecture d'un microprocesseur est très variable d'une architecture à une autre, cependant les principaux éléments d'un microprocesseur sont les suivants :
- Une unité d'instruction (ou unité de commande, en anglais control unit) qui lit les données arrivant, les décode puis les envoie à l'unité d'exécution ;L'unité d'instruction est notamment constituée des éléments suivants :
- séquenceur (ou bloc logique de commande) chargé de synchroniser l'exécution des instructions au rythme d'une horloge. Il est ainsi chargé de l'envoi des signaux de commande ;
- compteur ordinal contenant l'adresse de l'instruction en cours ;
- registre d'instruction contenant l'instruction suivante.
- Une unité d'exécution (ou unité de traitement), qui accomplit les tâches que lui a données l'unité d'instruction. L'unité d'exécution est notamment composée des éléments suivants :
- L'unité arithmétique et logique (notée UAL ou en anglais ALU pour Arithmetical and Logical Unit). L'UAL assure les fonctions basiques de calcul arithmétique et les opérations logiques (ET, OU, Ou exclusif, etc.) ;
- L'unité de virgule flottante (notée FPU, pour Floating Point Unit), qui accomplit les calculs complexes non entiers que ne peut réaliser l'unité arithmétique et logique.
- Le registre d'état ;
- Le registre accumulateur.
- Une unité de gestion des bus (ou unité d'entrées-sorties), qui gère les flux d'informations entrant et sortant, en interface avec la mémoire vive du système ;
Le schéma ci-dessous donne une représentation simplifiée des éléments constituant le processeur (l'organisation physique des éléments ne correspond pas à la réalité) :

Transistor
Pour effectuer le traitement de l'information, le microprocesseur possède un ensemble d'instructions, appelé " jeu d'instructions ", réalisées grâce à des circuits électroniques. Plus exactement, le jeu d'instructions est réalisé à l'aide de semiconducteurs, " petits interrupteurs " utilisant l'effet transistor, découvert en 1947 par John Barden, Walter H. Brattain et William Shockley qui reçurent le prix Nobel en 1956 pour cette découverte.
Un transistor (contraction de transfer resistor, en français résistance de transfert) est un composant électronique semi-conducteur, possédant trois électrodes, capable de modifier le courant qui le traverse à l'aide d'une de ses électrodes (appelée électrode de commande). On parle ainsi de "composant actif", par opposition aux " composants passifs ", tels que la résistance ou le condensateur, ne possédant que deux électrodes (on parle de " bipolaire ").
Le transistor MOS (métal, oxyde, silicium) est le type de transistor majoritairement utilisé pour la conception de circuits intégrés. Le transistor MOS est composé de deux zones chargées négativement, appelées respectivement source (possédant un potentiel quasi-nul) et drain (possédant un potentiel de 5V), séparées par une région chargée positivement, appelée substrat (en anglais substrate). Le substrat est surmonté d'une électrode de commande, appelée porte (en anglais gate, parfois également appelée grille), permettant d'appliquer une tension sur le substrat.

Lorsqu'aucune tension n'est appliquée à l'électrode de commande, le substrat chargé positivement agit telle une barrière et empêche les électrons d'aller de la source vers le drain. En revanche, lorsqu'une tension est appliquée à la porte, les charges positives du substrat sont repoussées et il s'établit un canal de communication, chargé négativement, reliant la source au drain.
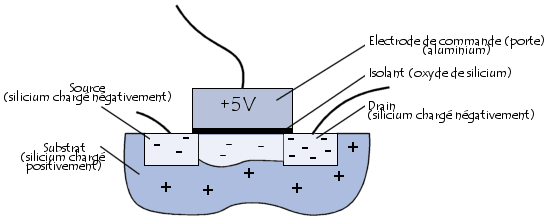
Le transistor agit donc globalement comme un interrupteur programmable grâce à l'électrode de commande. Lorsqu'une tension est appliquée à l'électrode de commande, il agit comme un interrupteur fermé, dans le cas contraire comme un interrupteur ouvert.
Circuits intégrés
Assemblés, les transistors peuvent constituer des circuits logiques, qui, assemblés à leur tour, constituent des processeurs. Le premier circuit intégré date de 1958 et a été mis au point par la société Texas Instruments.
Les transistors MOS sont ainsi réalisés dans des tranches de silicium (appelées wafer, traduisez gaufres), obtenues après des traitements successifs. Ces tranches de silicium sont alors découpées en éléments rectangulaires, constituant ce que l'on appelle un " circuit ". Les circuits sont ensuite placés dans des boîtiers comportant des connecteurs d'entrée-sortie, le tout constituant un " circuit intégré ". La finesse de la gravure, exprimée en microns (micromètres, notés µm), définit le nombre de transistors par unité de surface. Il peut ainsi exister jusqu'à plusieurs millions de transistors sur un seul processeur.
La loi de Moore, édictée en 1965 par Gordon E. Moore, cofondateur de la société Intel, prévoyait que les performances des processeurs (par extension le nombre de transistors intégrés sur silicium) doubleraient tous les 12 mois. Cette loi a été révisée en 1975, portant le nombre de mois à 18. La loi de Moore se vérifie encore aujourd'hui.
Dans la mesure où le boîtier rectangulaire possède des broches d'entrée-sortie ressemblant à des pattes, le terme de " puce électronique " est couramment employé pour désigner les circuits intégrés.
Familles
Chaque type de processeur possède son propre jeu d'instruction. On distingue ainsi les familles de processeurs suivants, possédant chacun un jeu d'instruction qui leur est propre :
- 80x86 : le " x " représente la famille. On parle ainsi de 386, 486, 586, 686, etc.
- ARM
- IA-64
- MIPS
- Motorola 6800
- PowerPC
- SPARC
- ...
Cela explique qu'un programme réalisé pour un type de processeur ne puisse fonctionner directement sur un système possédant un autre type de processeur, à moins d'une traduction des instructions, appelée émulation. Le terme " émulateur " est utilisé pour désigner le programme réalisant cette traduction.
Jeu d'instruction
On appelle jeu d'instructions l'ensemble des opérations élémentaires qu'un processeur peut accomplir. Le jeu d'instruction d'un processeur détermine ainsi son architecture, sachant qu'une même architecture peut aboutir à des implémentations différentes selon les constructeurs.
Le processeur travaille effectivement grâce à un nombre limité de fonctions, directement câblées sur les circuits électroniques. La plupart des opérations peuvent être réalisé à l'aide de fonctions basiques. Certaines architectures incluent néanmoins des fonctions évoluées courante dans le processeur.
Architecture CISC
L'architecture CISC (Complex Instruction Set Computer, soit " ordinateur à jeu d'instruction complexe ") consiste à câbler dans le processeur des instructions complexes, difficiles à créer à partir des instructions de base.
L'architecture CISC est utilisée en particulier par les processeurs de type 80x86. Ce type d'architecture possède un coût élevé dû aux fonctions évoluées imprimées sur le silicium.
D'autre part, les instructions sont de longueurs variables et peuvent parfois nécessiter plus d'un cycle d'horloge. Or, un processeur basé sur l'architecture CISC ne peut traîter qu'une instruction à la fois, d'où un temps d'exécution conséquent.
Architecture RISC
Un processeur utilisant la technologie RISC (Reduced Instruction Set Computer, soit " ordinateur à jeu d'instructions réduit ") n'a pas de fonctions évoluées câblées.
Les programmes doivent ainsi être traduits en instructions simples, ce qui entraîne un développement plus difficile et/ou un compilateur plus puissant. Une telle architecture possède un coût de fabrication réduit par rapport aux processeurs CISC. De plus, les instructions, simples par nature, sont exécutées en un seul cycle d'horloge, ce qui rend l'exécution des programmes plus rapide qu'avec des processeurs basés sur une architecture CISC. Enfin, de tels processeurs sont capables de traîter plusieurs instructions simultanément en les traitant en parallèle.
Améliorations technologiques
Au cours des années, les constructeurs de microprocesseurs (appelés fondeurs), ont mis au point un certain nombre d'améliorations permettant d'optimiser le fonctionnement du processeur.
Le parallélisme
Le parallélisme consiste à exécuter simultanément, sur des processeurs différents, des instructions relatives à un même programme. Cela se traduit par le découpage d'un programme en plusieurs processus traités en parallèle afin de gagner en temps d'exécution.
Ce type de technologie nécessite toutefois une synchronisation et une communication entre les différents processus, à la manière du découpage des tâches dans une entreprise : le travail est divisé en petits processus distincts, traités par des services différents. Le fonctionnement d'une telle entreprise peut être très perturbé lorsque la communication entre les services ne fonctionne pas correctement.
Le pipeline
Le pipeline (ou pipelining) est une technologie visant à permettre une plus grande vitesse d'exécution des instructions en parallélisant des étapes.
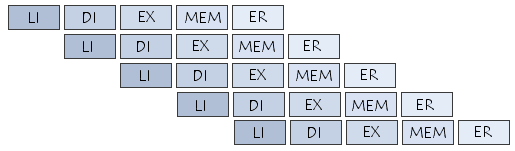
Pour comprendre le mécanisme du pipeline, il est nécessaire au préalable de comprendre les phases d'exécution d'une instruction. Les phases d'exécution d'une instruction pour un processeur contenant un pipeline " classique " à 5 étages sont les suivantes :
- LI : (Lecture de l'Instruction (en anglais FETCH instruction) depuis le cache ;
- DI : Décodage de l'Instruction (DECODe instruction) et recherche des opérandes (Registre ou valeurs immédiate);
- EX : Exécution de l'Instruction (EXECute instruction) (si ADD, on fait la somme, si SUB, on fait la soustraction, etc.);
- MEM : Accès mémoire (MEMory access), écriture dans la mémoire si nécéssaire ou chargement depuis la mémoire ;
- ER : Ecriture (Write instruction) de la valeur calculée dans les registres.
Les instructions sont organisées en file d'attente dans la mémoire, et sont chargées les unes après les autres.
Grâce au pipeline, le traitement des instructions nécessite au maximum les cinq étapes précédentes. Dans la mesure où l'ordre de ces étapes est invariable (LI, DI, EX, MEM et ER), il est possible de créer dans le processeur un certain nombre de circuits spécialisés pour chacune de ces phases.
L'objectif du pipeline est d'être capable de réaliser chaque étape en parallèle avec les étapes amont et aval, c'est-à-dire de pouvoir lire une instruction (LI) lorsque la précédente est en cours de décodage (DI), que celle d'avant est en cours d'exécution (EX), que celle située encore précédemment accède à la mémoire (MEM) et enfin que la première de la série est déjà en cours d'écriture dans les registres (ER).
Il faut compter en général 1 à 2 cycles d'horloge (rarement plus) pour chaque phase du pipeline, soit 10 cycles d'horloge maximum par instruction. Pour deux instructions, 12 cycles d'horloge maximum seront nécessaires (10+2=12 au lieu de 10*2=20), car la précédente instruction était déjà dans le pipeline. Les deux instructions sont donc en traitement dans le processeur, avec un décalage d'un ou deux cycles d'horloge). Pour 3 instructions, 14 cycles d'horloge seront ainsi nécessaires, etc.
Le principe du pipeline est ainsi comparable avec une chaîne de production de voitures. La voiture passe d'un poste de travail à un autre en suivant la chaîne de montage et sort complètement assemblée à la sortie du bâtiment. Pour bien comprendre le principe, il est nécessaire de regarder la chaîne dans son ensemble, et non pas véhicule par véhicule. Il faut ainsi 3 heures pour faire une voiture, mais pourtant une voiture est produite toute les minutes !
Il faut noter toutefois qu'il existe différents types de pipelines, de 2 à 40 étages, mais le principe reste le même.
Technologie superscalaire
La technologie superscalaire (en anglais superscaling) consiste à disposer plusieurs unités de traitement en parallèle afin de pouvoir traiter plusieurs instructions par cycle.
HyperThreading
La technologie HyperThreading (ou Hyper-Threading, noté HT, traduisez HyperFlots ou HyperFlux) consiste à définir deux processeurs logiques au sein d'un processeur physique. Ainsi, le système reconnaît deux processeurs physiques et se comporte en système multitâche en envoyant deux thréads simultanés, on parle alors de SMT (Simultaneous Multi Threading). Cette " supercherie " permet d'utiliser au mieux les ressources du processeur en garantissant que des données lui sont envoyées en masse.
Multi-coeur
Un processeur multi-coeur est tout simplement un processeur composé non pas de 1 mais de 2 (ou 4 ou 8) unités de calcul. Ainsi, pour un processeur bi-coeur (ou DualCore) le processeur dispose à fréquence d'horloge égale d'une puissance de calcul deux fois plus importante. Pour autant, le gain n'est pas systématiquement visible. En effet, il faut que les logiciels et les systèmes d'exploitation sachent gérer correctement ces processeurs afin qu'un gain significatif soit perceptible. Ainsi, sous Windows, seul Vista et Sept exploitent correctement ces processeurs. Dans ce cas, la version 64 bits est conseillée.
Ressources sur le même sujet
Intel ou AMD ?
Les deux marques du marché des processeurs se livrent une guerre sans merci et ont leurs aficionados. Globalement, aujourd'hui, les plus raisonnables s'accordent à dire que, côté qualité, elles se valent, même si Intel possède la plus grosse part du marché. Après, le choix est une question personnelle : les gamers se tournent facilement vers les AMD, en particulier les Ryzen ils sont performants et abordables. Par contre, Intel est la référence pour les processeurs haut de gamme Core i7, ainsi que pour les portables avec son Atom à très faible consommation électrique.
Nombre de cœurs
La tendance actuelle est au multi-cœurs : la nouvelle génération Nehalem d'Intel propose des Dual Core avec Hyperthreading, soit 4 threads simultanés, ou bien des Quad Core avec Hyperthreading, soit jusqu'à 8 threads simultanés.
Mais attention, deux cœurs sur le même processeur, ce n'est pas systématiquement deux fois plus de puissance, car ça dépend des applications.
- Les "mono core" existent toujours pour les ordinateurs portables premier prix, les Netbooks. Peu puissants mais économes en énergie, ils sont suffisants pour de la bureautique simple.
- Les "dual core" sont les plus courants de nos jours sur ordinateur portable : c'est un bon compromis puissance/consommation. Si la configuration est bonne, on peut faire du montage photo tout en lançant une analyse antivirus sans que cela ne ralentisse trop l'ordinateur.
- Les "quad core" sont les plus puissants, et se sont généralisés sur les PC de bureau en 2010 : à conseiller pour les machines vouées aux applications lourdes et nécessitant de la puissance. Certains jeux n'utilisent pas encore la technologie quad-core, mais ils devraient être plus rares cette année.
Fréquence
La fréquence s'exprime en GigaHertz (GHz), elle signifie le nombre d'opérations que fait le processeur en une seconde. 3GHz = 3 milliards d'opération à la seconde. En clair, elle influe sur la vitesse de fonctionnement du processeur. Actuellement, les processeurs tournent entre 1.5 et 3 GHz. Certains atteignent 3.5 GHz. Attention toutefois, on ne peut comparer la fréquence que de 2 processeurs conçus sur la même architecture ! Par exemple, un Core i5 750 à 2.66GHz est plus puissant qu'un Quad Core Q9650 à 3GHz...
Si la fréquence reste quand même le critère essentiel pour les gamers, elle n'est cependant pas l'unique référence pour la performance d'un processeur. On l'a vu, il y a le nombre de cœurs. Mais on doit aussi faire attention à la mémoire cache , celle que le processeur utilise pour stocker les informations dont il se sert souvent. Elle est d'accès beaucoup plus rapide que les mémoires RAM mais a moins de capacité. Il y a actuellement jusqu'à trois niveaux de mémoire cache : L1, L2 et L3, pour optimiser les performances des processeurs.
Socket
Il faut prêter attention au socket de la carte mère, qui doit être le même que celui du processeur que vous comptez acheter. C'est sur ce support physique que se monte le CPU. Ils se classent en fonction de leur fabricant : LGA 1150, LGA 1155, LGA 1200 chez Intel, AM3, AM4, AM5 chez AMD. Mais le socket n'est pas toujours une condition suffisante pour garantir la compatibilité du nouveau processeur. Il faut aussi que le Bios de la carte mère sache le gérer.
Pour en savoir plus sur les processeurs pour PC fixe, consultez notre guide d'achat.